Trajectory Tracking Control of the Furuta Pendulum by Feedback Linearization (Fast trajectory) Carlos 0:25 10 years ago 598 Скачать Далее
Trajectory Tracking Control of the Furuta Pendulum by Feedback Linearization (Slow trajectory) Carlos 0:25 10 years ago 328 Скачать Далее
Feedback linearization control applied to the Furuta pendulum. Carlos 0:23 11 years ago 1 105 Скачать Далее
Swing-up and stabilization of the Furuta pendulum using feedback linearization algorithm Carlos 0:40 10 years ago 1 141 Скачать Далее
Trajectory Tracking of WMR Based on Feedback Linearization and Model Predictive Control Mohamed A. Kamel 1:35 9 years ago 2 237 Скачать Далее
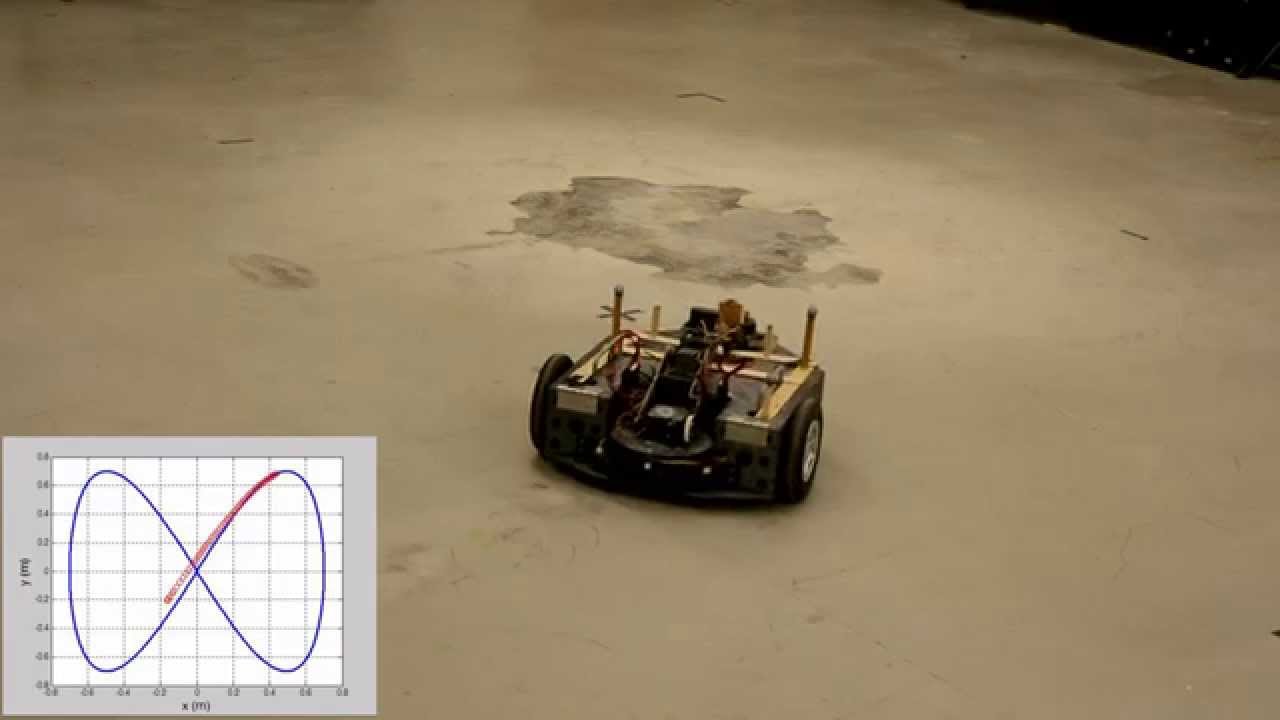
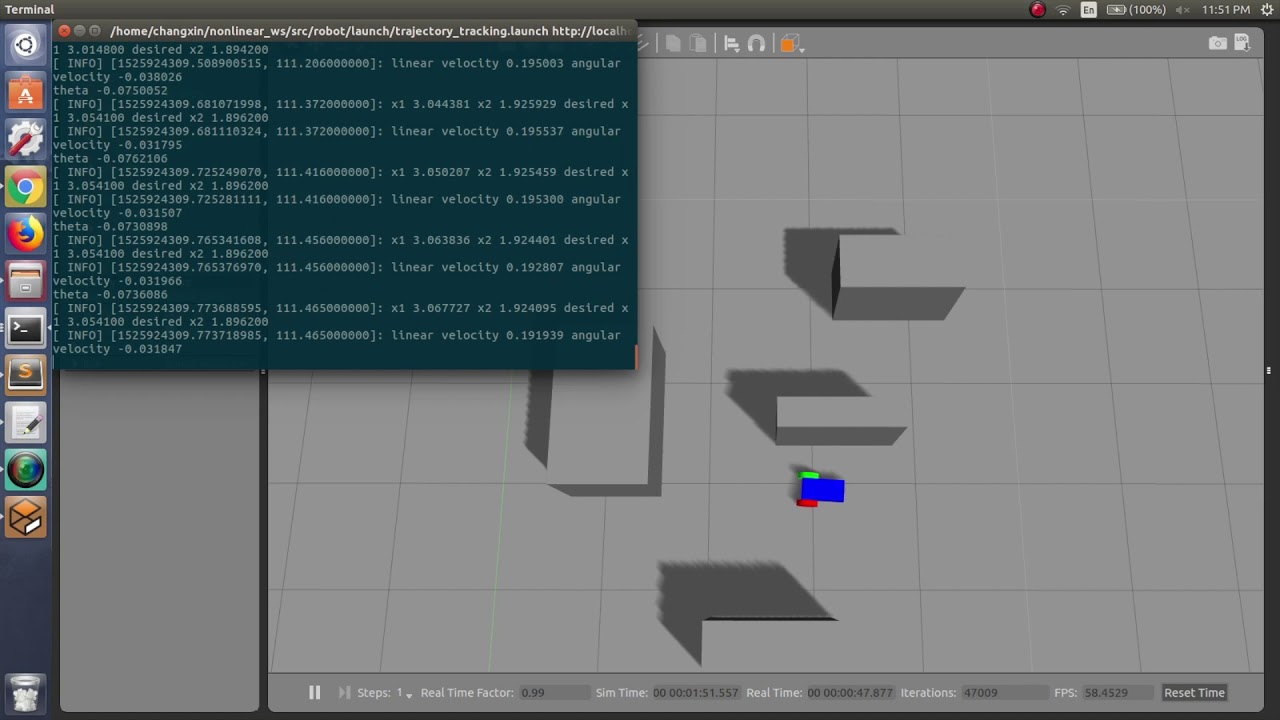
Trajectory Tracking Gazebo Simulation Using Feedback Linearization changxin yan 1:04 6 years ago 265 Скачать Далее
Trajectory tracking controller for the inertia wheel pendulum Carlos 1:59 8 years ago 2 966 Скачать Далее
Self Balancing Robot: Feedback Linearization Control for Trajectory Tracking | Matlab Simulink 3D jitendra singh 0:55 3 years ago 1 942 Скачать Далее
Ball and plate using tracking with integral action based on feedback linearization arturo contreras martinez 0:15 6 years ago 85 Скачать Далее
[Unity3D] trajectory tracking via feedback linearization gransoporo 1:21 10 years ago 736 Скачать Далее
AAU3 - Balancing Test (Nonlinear Feedback Linearization) Rasmus Lundgaard Christensen 0:31 9 years ago 1 078 Скачать Далее
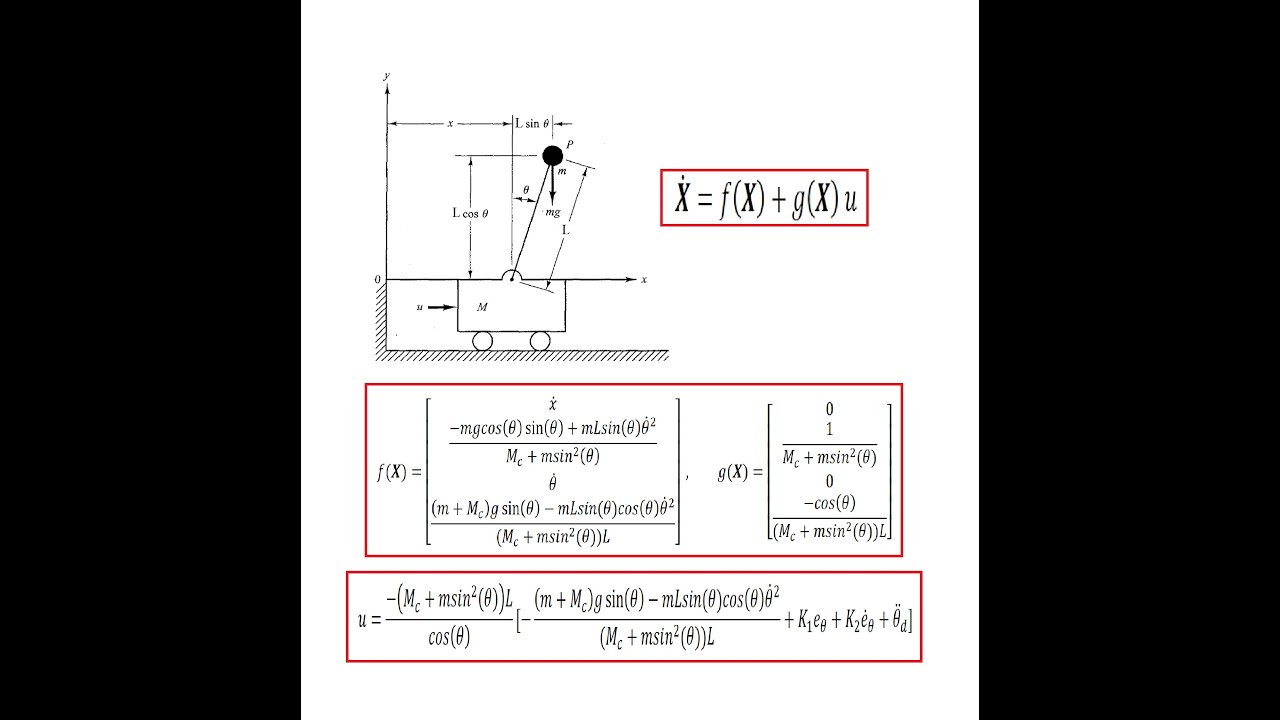
Nonlinear Control of Inverted Pendulum on Cart (Feedback Linearization) Engineering Educator Academy 24:45 6 months ago 1 219 Скачать Далее
A Design Example in MapleSim: Controlling a Robot using Feedback Linearization Maplesoft 24:16 8 years ago 9 946 Скачать Далее
Quadrotor trajectory tracking, the Transverse Linearization Approach Maksim Surov 0:15 5 years ago 48 Скачать Далее
Nonlinear Optimal Tracking Control for the Furuta Pendulum Serafin Ramos Paz 2:19 7 years ago 83 Скачать Далее